スマートフォンの傾き角の計算
スマートフォンの水平状態からの傾き角度を計算します。
ここで水平状態とは、例えば、テーブル上にスマートフォンを置いた状態です。
スマートフォンが、水平状態からどの程度傾いているかを計算します。
これが分かると、「水準器」などが作れます。
スマートフォンの座標系
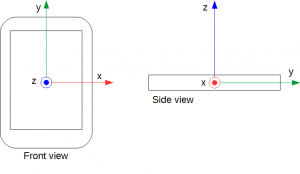
Fig.1 は、スマートフォンの座標系です。
Front view
Fig.1 左側は、スマートフォンの正面図(Front view)です。
スマートフォンを正面から見た図です。
- スマートフォンは、画面がある側が「正面」
画面中央に座標系の原点があります。
そこから、スマートフォン画面の右方向に「x軸」が伸びています。
また、上方向に「y軸」が伸びています。
「z軸」は、画面から手前方向に伸びています。
Side view
Fig.1 右側は、スマートフォンの側面図(Side view)です。
スマートフォンを側面から見た図です。
水平状態のスマートフォン
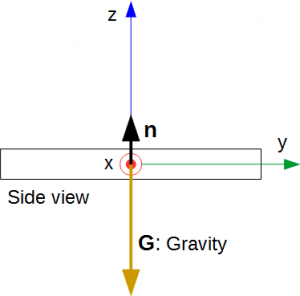
Fig.2 は、水平なテーブルの上に置いたスマートフォンの図です。
- 水平状態: テーブルの上に置いた状態
Gravity(G)
スマートフォンを水平状態にした場合、重力加速度(G)は Z軸と真逆方向(-Z軸)となります(Fig.2 参照)。
また、重力加速度はスマートフォンの加速度センサーで計測されます。
大体、式(1) の値となります。

(注)実際に、スマートフォンをテーブル上に置いて、重力加速度(G)を計測すると、式(1) を中心として値が細かく揺れます。
スマートフォン画面の向き(n)
Fig.2 から、z軸がスマートフォン画面の法線ベクトル(n)になっていることが分かります。
- スマートフォンの向き: z軸方向
スマートフォンの向き(n) は、次式となります。

n はz 成分のみの単位ベクトルです。
傾いたスマートフォン
Fig.3 は、傾いたスマートフォンの図です。
- x軸の回りに、角度(θ)回転して傾いています。
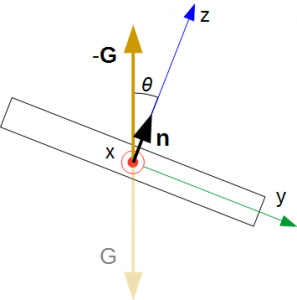
Fig.3 傾いたスマートフォン
この場合、スマートフォンの加速度センサーで検出する重力加速度(G)は次式となります。

(注)記号 | a | は、ベクトル a の絶対値を表します。
一般に、スマートフォンの傾き角(θ)は、2 つのベクトル-G とn の内積から求められます(Fig.3 参照)。
![]()
ここで、- G は、重力加速度(G)の符号を逆にしたものです(Fig.3 参照)。
式(4) を変形すると、次式となります。
![]()
n はz 成分のみの単位ベクトルだったので、式(5) は以下となります。
![]()
式(6) が、スマートフォンの傾き角(θ)の計算結果です。
ここで、重力加速度(G)は、加速度センサーから得られる値を用います。



