水準器アプリの試作2
スマートフォンをテーブルに置くとテーブルの傾きが分かる。
そんな「水準器アプリ」を試作しました。
本記事は、「水準器アプリの試作1」の続き記事です。
今回試作する「水準器」は、大きく2つの機能で構成されています。
先ず、加速度センサーから、スマ-トフォンの傾き(方向、角度)を計算する、計算機能。
次に、計算結果をビジュアル表示する、表示機能です。
- 計算機能:加速度センサー計算
- 表示機能:スマホ傾き表示
前回「水準器アプリの試作1」で、「表示機能」について説明しました。
今回「水準器アプリの試作2」で、「計算機能」について説明します。
座標系
Fig.1 は、スマートフォンの座標系です。
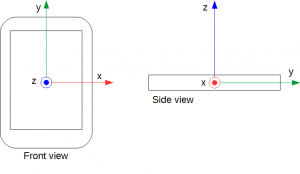
Fig.1 左側が、スマートフォンの正面図です。
Fig.1 右側は、スマートフォンの側面図です。
座標系の各軸には色が付いています。
- x 座標:赤
- y 座標:緑
- z 座標:青
加速度センサー
Fig.2 は、スマートフォンを前傾させた図です。
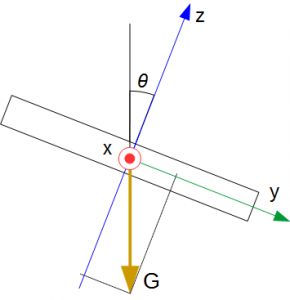
- スマートフォンを「静かに」前傾させています
そのため、重力(G)以外の加速度が発生していない状態です。
Fig.2 の状況で、加速度センサーからの出力値 A は、以下となります(注1)。

(注1)実際には、上記値を中心に、値が細かく振動しています。
傾きの検出
スマートフォンを「静かに」傾けた場合、加速度センサーからの出力値 A は、重力のみを検出します。

重力(G)は、常に鉛直方向を向いているので、重力を検出することで、スマートフォンの傾き(方向、角度)が分かります。
- 重力(G)を検出 → スマートフォンの傾きが計算できる
水準器アプリの計算機能
水準器アプリでは、加速度センサーで検出した重力(G) から、スマートフォンの傾き(方向、角度)を計算します。
傾き方向
スマートフォンの傾き方向の各成分は、以下となります。
![]()
傾き角度
スマートフォンの傾き角度は、次式で計算します。
![]()
式 (4) の詳細は、以下の記事をご参照ください。
閾値(Threshold)
傾き角度が小さい場合、傾き角度を「0°」とします。
Fig.2 を見ると、傾き角度が小さくなると、G sin θ の値が小さくなることが分かります。
実際にθ を、1° で計算すると、以下となります(注3)。
![]()
(注3)重力加速度(G)の値を、9.8 m/s2 としました
そこで、閾値(Threshold)を以下としました。
- Threshold: 0.15
次の g を計算し、それが Threshold 以下であれば、「0°」とみなしています。
![]()
プログラム
プログラム1
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8">
<title>Level</title>
<style type="text/css">
* { margin: 0; padding: 0; border: 0; }
</style>
<script>
var canvas;
var ctx; // context
var i0, j0; //
var C = []; // The center of the canvas
var S = []; // Position of the square
var edgLen = 300; // Edge length[pixel]
var oldTheta = 0; // θ
var oldG_x = 0; //
var oldG_y = 0; //
var THRESHOLD = 0.15; //
var osCorrect = 1; // -1:Android, 1:Others
window.addEventListener("devicemotion", function(evt){
//
var accel = evt.accelerationIncludingGravity;
var G_x = osCorrect*accel.x;
var G_y = osCorrect*accel.y;
var G_z = osCorrect*accel.z;
//
var G = Math.sqrt(G_x*G_x+G_y*G_y+G_z*G_z);
var theta = 180/Math.PI*Math.acos(-G_z/G);
//
theta = 0.9*oldTheta + 0.1*theta;
G_x = 0.9*oldG_x + 0.1*G_x;
G_y = 0.9*oldG_y + 0.1*G_y;
oldTheta = theta;
oldG_x = G_x;
oldG_y = G_y;
//
drawSquare(G_x, G_y);
writeTheta(theta);
}, true);
function writeTheta(theta) {
ctx.font = "bold 50pt sans-serif";
ctx.fillStyle = "blue";
ctx.fillText(theta.toFixed(1).toString(10),C[0]-50,C[1]+20);
}
function drawSquare(G_x, G_y) {
var g = Math.sqrt(G_x*G_x+G_y*G_y);
if (g>THRESHOLD) {
var r = edgLen/2;
var P = [];
P[0] = S[0] + r + r*G_x/g;
P[1] = S[1] + r - r*G_y/g;
drawGradation(P);
} else {
ctx.fillStyle = "green";
ctx.fillRect(S[0], S[1], edgLen, edgLen);
ctx.fill();
}
}
function drawGradation(P) {
var Q = [];
Q[0] = 2*C[0] - P[0]; // S[0] + (C[0]-S[0]) - (P[0]-C[0])
Q[1] = 2*C[1] - P[1]; // S[1] + (C[1]-S[1]) + (C[1]-P[1])
//
var grad = ctx.createLinearGradient(P[0], P[1], Q[0], Q[1]);
grad.addColorStop(0, "black");
grad.addColorStop(1, "white");
ctx.fillStyle = grad;
//
ctx.fillRect(S[0], S[1], edgLen, edgLen);
ctx.fill();
}
window.onload = function() {
canvas = document.getElementById("canvas");
//
canvas.setAttribute("width", window.innerWidth);
canvas.setAttribute("height", window.innerHeight);
ctx = canvas.getContext("2d");
if (!ctx) return;
//
i0 = window.innerWidth/2;
j0 = window.innerHeight/2;
C[0] = i0;
C[1] = j0;
S[0] = C[0] - edgLen/2;
S[1] = C[1] - edgLen/2;
//
if (navigator.userAgent.match(/Android/)) osCorrect = -1;
}
</script>
</head>
<body>
<canvas id="canvas" style="background-color:green;"></canvas>
</body>
</html>
プログラム1 の解説
グローバル変数
var canvas;
var ctx; // context
var i0, j0; //
var C = []; // The center of the canvas
var S = []; // Position of the square
var edgLen = 300; // Edge length[pixel]
var oldTheta = 0; // θ
var oldG_x = 0; //
var oldG_y = 0; //
var THRESHOLD = 0.15; //
var osCorrect = 1; // -1:Android, 1:Others
プログラム1 の13 行目、2 次元変数 C は、Canvas の中心座標を保存する変数です。
スマートフォンの傾き(方向、角度)は、スマートフォンの中心にある正方形領域に描画します。
14 行目、2 次元変数 S は、その正方形領域のCanvas 上での位置を保存する変数です。
詳細は、記事「水準器アプリの試作1」をご参照ください。
15 行目、変数 edgLen は、正方形領域の一辺の長さです。
16 – 18 行、各値を平滑化するための変数です。
- oldTheta: 傾き角度(θ)
- oldGx :傾き方向(Gx)
- oldGy :傾き方向(Gy)
詳細は、記事「スマホセンサーのノイズ軽減」をご参照ください。
19 行目、変数 THRESHOLD は、式 (6) の閾値です。
20 行目、変数 osCorrect は、スマートフォンがAndroid の場合、補正するための変数です。
詳細は、記事「加速度センサーのAndroid 補正」をご参照ください。
window.onload 関数
window.onload = function() {
canvas = document.getElementById("canvas");
//
canvas.setAttribute("width", window.innerWidth);
canvas.setAttribute("height", window.innerHeight);
ctx = canvas.getContext("2d");
if (!ctx) return;
//
i0 = window.innerWidth/2;
j0 = window.innerHeight/2;
C[0] = i0;
C[1] = j0;
S[0] = C[0] - edgLen/2;
S[1] = C[1] - edgLen/2;
//
if (navigator.userAgent.match(/Android/)) osCorrect = -1;
}
プログラム1 の86 – 91 行、詳細は、記事「水準器アプリの試作1」をご参照ください。
93 行目、スマートフォンがAndroid の場合、osCorrect に -1 を代入します。
詳細は、記事「加速度センサーのAndroid 補正」をご参照ください。
devicemotion イベント
window.addEventListener("devicemotion", function(evt){
//
var accel = evt.accelerationIncludingGravity;
var G_x = osCorrect*accel.x;
var G_y = osCorrect*accel.y;
var G_z = osCorrect*accel.z;
//
var G = Math.sqrt(G_x*G_x+G_y*G_y+G_z*G_z);
var theta = 180/Math.PI*Math.acos(-G_z/G);
//
theta = 0.9*oldTheta + 0.1*theta;
G_x = 0.9*oldG_x + 0.1*G_x;
G_y = 0.9*oldG_y + 0.1*G_y;
oldTheta = theta;
oldG_x = G_x;
oldG_y = G_y;
//
drawSquare(G_x, G_y);
writeTheta(theta);
}, true);
プログラム1 の24 – 27 行、加速度センサーの値を得ています。
また、スマートフォンがAndroid の場合、補正処理しています。
29 – 30 行、傾き角度(θ)を計算しています。
32 – 37 行、各値(θ, Gx, Gy)の平滑化処理しています。
39 行目、drawSquare 関数を呼んでいます。
40 行目、writeTheta 関数を呼んでいます。
writeTheta 関数
function writeTheta(theta) {
ctx.font = "bold 50pt sans-serif";
ctx.fillStyle = "blue";
ctx.fillText(theta.toFixed(1).toString(10),C[0]-50,C[1]+20);
}
正方形の中心に、傾き角(θ)の値を表示しています。
drawSquare 関数
function drawSquare(G_x, G_y) {
var g = Math.sqrt(G_x*G_x+G_y*G_y);
if (g>THRESHOLD) {
var r = edgLen/2;
var P = [];
P[0] = S[0] + r + r*G_x/g;
P[1] = S[1] + r - r*G_y/g;
drawGradation(P);
} else {
ctx.fillStyle = "green";
ctx.fillRect(S[0], S[1], edgLen, edgLen);
ctx.fill();
}
}
プログラム1 の50 行目、閾値処理のための変数 g を計算しています。
52 – 56 行、g が閾値より大なので、drawGradation 関数へ渡す引数を計算し、drawGradation 関数を呼んでいます。
58 – 60 行、g が閾値以下なので、正方形を「green」で塗ります。
drawGradation 関数
function drawGradation(P) {
var Q = [];
Q[0] = 2*C[0] - P[0]; // S[0] + (C[0]-S[0]) - (P[0]-C[0])
Q[1] = 2*C[1] - P[1]; // S[1] + (C[1]-S[1]) + (C[1]-P[1])
//
var grad = ctx.createLinearGradient(P[0], P[1], Q[0], Q[1]);
grad.addColorStop(0, "black");
grad.addColorStop(1, "white");
ctx.fillStyle = grad;
//
ctx.fillRect(S[0], S[1], edgLen, edgLen);
ctx.fill();
}
drawGradation 関数は、記事「水準器アプリの試作1」をご参照ください。